Category: Blog
Stop motion OST MV: Crystal sunshine
Introducing a stop motion music video project that we proudly took part in. We collaborated with Tidu Workshop to create the armatures for main characters of this video, a male and a female armature in 1/6 scale, about 30cm tall.




The making of the armatures was started from November, and within 2 weeks, we deliver the very first prototypes of our armatures to character design team. In photos below, we are covering the armatures’ joints with memory foam to prevent clay or silicone stuck in between it.







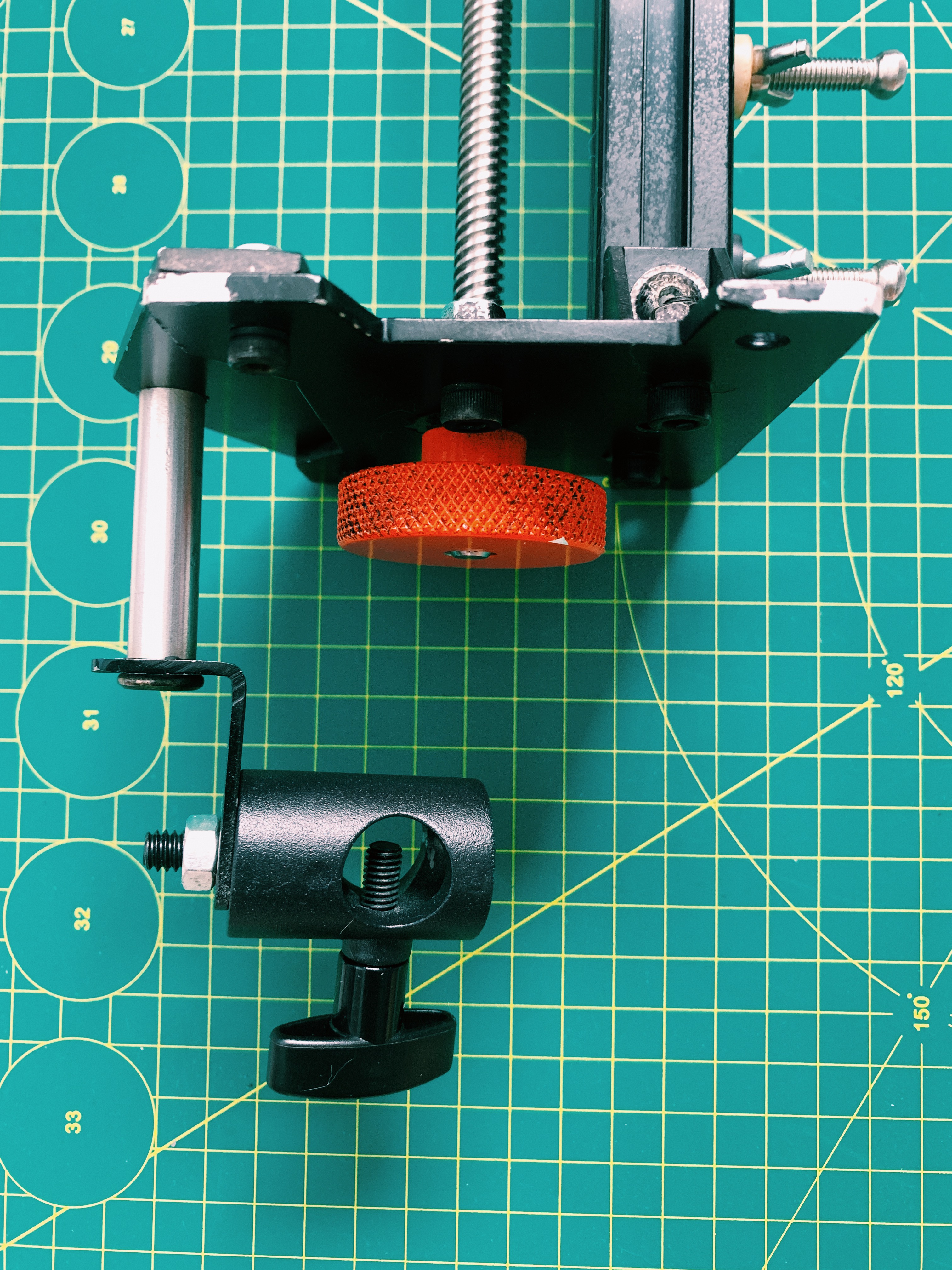
Beside making the armatures. We are also created a custom slider combine with a 30cm tall winder for the film maker. The tool that allow animator to animate some specific difficult scenes. For example the timelapse scene, the close up of butterfly flying over male character’s face.






Cuộc chiến của Pô | phim stop motion
Hôm nay, mình muốn giới thiệu, đúng hơn là ‘khoe’ một chút về bộ phim stop motion quảng cáo mới nhất mà mình từng tham gia với vai trò đạo diễn và sản xuất. Phim ngắn ‘Cuộc chiến của Pô’ cho Antibio Pro, một sản phẩm men vi sinh đường ruột của hãng dược phẩm Bayer.
Continue reading “Cuộc chiến của Pô | phim stop motion”